

You have an error in your SQL syntax; check the manual that corresponds to your MySQL server version for the right syntax to use near '' at line 1
原因有很多,其中一种就是缺少主键。

一般地,应选择尺寸小于显存的大模型版本,且适当冗余。
譬如,显存 8GB,选择尺寸为 5.2GB 的 deepseek-r1:8b。
这样,整个大模型都能被完整地读取到显存中。
若选择 9.0GB 的 deepseek-r1:14b 则显存不足,Ollama 会自动调用系统内存和 CPU 来协同工作,导致推理速度显著下降。
显卡的算力影响生成的速度,模型的参数决定生成的质量。
另外经实测,在 /api/generate 接口的 format 参数中设置返回的 JSON 格式,会缩短生成时间,降低生成质量,可能的原因是强制格式限制了词汇选择空间。
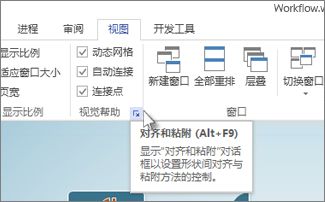
1、在“视图”选项卡上展开“视觉帮助”
2、在“对齐和粘附”对话框中的“常规”选项卡上,在“当前活动”下,清除“粘附”复选框。
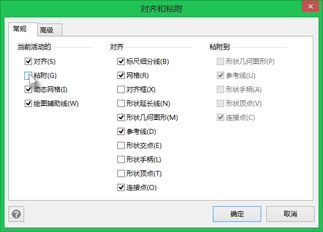
3、操作方式
直接拖动连接线的端点仍然是自动粘附至形状的,按住 Alt 再拖动则会在任意位置停留。
此设置的缺点是:无法在鼠标自动依靠形状时自动提示连接线,需要复制已有连接线来达到新建的目的。
今天遇到一个向基于 .NET Framework 框架开发的 Web 网站 POST 数据响应 405 Method Not Allowed 的问题。
服务端接口地址是 https://***/api/abc/Default.aspx,
若请求 https://***/api/abc/Default.aspx 或 https://***/api/abc/ 则正常 ,
若请求 https://***/api/abc 就会出现这个问题。
原因可能是服务器可能返回 301 重定向到 https://***/api/abc/Default.aspx,
导致最终接口接受到的请求方法不是 POST 。
查询路径:阿里云控制台 - 费用与成本 - 订购订单 - 企业服务产品订单
查询网址:https://billing-cost.console.aliyun.com/order/list/enterprise/paid
个人整理,仅供参考。具体规格请以官方发布为准。
 |  |  | |
|---|---|---|---|
| 名称 | X1 | X1 Pro | X3 Pro 日照金山(1母1子套装) |
| 上市时间 | 2025/4 | 2025/4 | 2025/11 |
| RAM | 512 MB | 512 MB | |
| ROM | 128 MB | 128 MB | |
| 频段 | 2.4 GHz 速率为 688 Mbps 5 GHz 速率为 2882 Mbps | 2.4 GHz 速率为 688 Mbps 5 GHz 速率为 2882 Mbps | 2.4 GHz 5 GHz |
| 天线 | 5 根全向高增益天线 5 根定向智能天线 1 根星闪天线 | 5 根全向高增益天线 5 根定向智能天线 1根 星闪天线 | |
| 星闪网关 | 支持 | 支持 | |
| 蓝牙网关 | 支持 | 支持 | |
| 接口 | 2.5GE * 2 1GE * 2 | 2.5GE * 4 | |
| Wi-Fi | Wi-Fi 7+ | Wi-Fi 7+ | Wi-Fi 7+ |
| 适用面积 | 90-120㎡ | 90-120㎡ | 主路由覆盖90㎡内,每增加一个子路由可扩展约30㎡ |
| 价格 |
表格于 2025 年 11 月整理更新。
确保已正确配置环境网站项目。
-----------------------------------------
2025/11/3 启动失败,查到项目日志过大(位于 F:\www\wwwlogs\net),清除后正常启动。
-----------------------------------------
不定时更新。
使用 Linq 语法调用数据库时,需要包含导航属性(外键表数据)会用到 Include 方法,但是如果引用的程序集搞错了,就不会有数据输出,应该:
using Microsoft.EntityFrameworkCore;
而不是
using System.Data.Entity;
个人整理,仅供参考。具体规格请以官方发布为准。

|

|

|

|

|

|

|

|
|
|---|---|---|---|---|---|---|---|---|
| 名称 | BE10000 | BE7000 | BE6500 Pro | BE6500 | BE3600 Pro 套装 | BE3600 Pro 网线版 | BE10000 Pro | BE7200 Pro |
| 型号 |
主:RN04 子:RN01 |
主:RP01 子:RP03 |
||||||
| 上市时间 | 2022.10 | 2023.5 | 2023.10 | 2024.8 | 2024.10 | 2025.5 | 2025.9 | 2026.5 |
| 处理器 | Qualcomm 四核 A73 2.2GHz | Qualcomm 四核 A73 1.5GHz | Qualcomm 四核 A53 1.5GHz | Qualcomm 四核 A53 1.1GHz |
主/子: 高通 IPQ5312 四核 1.1GHz |
主/子: Qualcomm Dragonwing N7 |
Qualcomm A7 四核 1.8GHz | Qualcomm 四核 A55 1.8GHz |
| 内存 | 2GB | 1GB | 1GB | 512MB |
主/子:512MB 一说子是 128MB |
主:512MB 子:256MB |
2GB | 1G DRAM + 512MB Flash |
| 频段 | 2.4GHz、5.2GHz、5.8GHz | 2.4GHz、5GHz | 2.4GHz、5GHz | 2.4GHz、5GHz | 2.4GHz、5GHz | 2.4GHz、5GHz | 2.4GHz、5.2GHz、5.8GHz | 2.4GHz、5GHz |
| 组网 | 混合 Mesh | 混合 Mesh | 混合 Mesh | 混合 Mesh | 混合 Mesh | AC + AP | AI Mesh | AI Mesh |
| 天线 | 12根高增益天线 + 12路信号放大器 + NFC内置天线 | 7根外置高增益WiFi天线 + 1根内置高增益WiFi天线 + NFC内置天线 | 6根高增益WiFi内置天线 + 1根蓝牙内置天线 + 1根NFC内置天线 | 6根外置高增益Wi-Fi天线 | 主/子:4根内置天线 |
主:无 子:2根内置双频天线 |
12根高增益天线 + 12路信号放大器 | 8根高增益天线 + 8路信号放大器 |
| 中枢网关 | 不支持 | 不支持 | 支持 | 不支持 |
主:支持 子:不支持 |
主:支持 子:不支持 |
支持 | 支持 |
| 蓝牙网关 | 不支持 | 不支持 |
蓝牙 Mesh 1.0 100 台 + 蓝牙 100 台 升级固件后支持蓝牙 Mesh 2.0 |
蓝牙 Mesh 1.0 |
蓝牙 Mesh 1.0 200 台 + 蓝牙 100 台 |
主:不支持 子:蓝牙 Mesh 2.0 |
蓝牙 Mesh 2.0 200 台 + 蓝牙 100 台 |
蓝牙 Mesh 2.0 200 台 + 蓝牙 100 台 |
| 散热 | 主动散热 | 自然散热 | 自然散热 | 自然散热 | 自然散热 |
主:自然散热 子:主动散热 |
主动散热 | 自然散热 |
| 接口 |
4×2.5G 1×10G 1×10G SFP+ 1×USB 3.0 |
4×2.5G 1×USB 3.0 |
4×2.5G | 4×2.5G |
主/子: 1×2.5G 3×1G |
主:5×2.5G 子:2×2.5G |
4×2.5G 2×10G 1×M.2 1×USB 3.0 |
4×2.5G |
| Wi-Fi | Wi-Fi 7 | Wi-Fi 7 | Wi-Fi 7 | Wi-Fi 7 | Wi-Fi 7 |
主:无 子:Wi-Fi 7 |
Wi-Fi 7 | Wi-Fi 7 |
| MLO 多链路聚合 |
双频 4.3Gbps 5 GHz 和 5 GHz-Game |
双频 4.3Gbps 5 GHz 和 5 GHz-Game |
双频 3.6Gbps 2.4 GHz 和 5 GHz |
双频 3.57Gbps 2.4 GHz 和 5 GHz |
双频 3.57Gbps 2.4 GHz 和 5 GHz |
双频 2.4 GHz 和 5 GHz |
双频 4.3Gbps 5 GHz 和 5 GHz-Game |
双频 3.6Gbps 2.4 GHz 和 5 GHz |
|
价格 |
最新价格 | 最新价格 | 最新价格 | 最新价格 | 最新价格 | 最新价格 | 最新价格 | 最新价格 |
-
表格于 2025 年 10 月整理更新。
-
如果只考虑支持蓝牙 Mesh 2.0,那么有 BE3600 Pro 网线版 和 BE10000 Pro 可选,搭配其它 Mesh 路由器实现全屋 Wi-Fi 7 覆盖,搭配其它中枢网关或从网关设备实现全屋蓝牙 Mesh 2.0 覆盖。
-
如果考虑用 Xiaomi 中枢网关 来部署独立的中枢架构,那么选择路由器就没有限制了。
-
名称中带有“全屋”字样的通常以子母套装形式出售,子母路由配置通常不同。购买两台一模一样的普通 BE 路由器,就相当于组建了一套“不分子母”的 Mesh 套装。
-
名称中带有“Pro”字样的通常具备中枢网关功能。
using System.Runtime.InteropServices;
/// <summary>
/// Windows 资源管理器的文件名排序规则(允许在非 Windows 平台使用)
/// <para>调用 Windows API(StrCmpLogicalW 函数)实现,仅在 Windows 平台环境中使用</para>
/// <para>基本规则如下:</para>
/// <para>将文件名中的数字作为数值来处理。</para>
/// <para>不区分大小写。</para>
/// <para>字符类型的大致优先级顺序为:特殊符号 → 数字 → 字母。</para>
/// <para>对于中文文件名,排序方式取决于系统的区域设置:拼音(默认)、笔画。</para>
/// </summary>
public class FileLogicalComparer : IComparer<string>
{
[DllImport("Shlwapi.dll", CharSet = CharSet.Unicode)]
private static extern int StrCmpLogicalW(string psz1, string psz2);
private static readonly bool IsWindows = RuntimeInformation.IsOSPlatform(OSPlatform.Windows);
public int Compare(string? x, string? y)
{
// 处理 null 值情况
if (x == null && y == null) return 0;
if (x == null) return -1;
if (y == null) return 1;
try
{
if (IsWindows)
{
// Windows 平台:使用原生 API
return StrCmpLogicalW(x, y);
}
else
{
// 非 Windows 平台:使用 C# 实现的回退方案
return NaturalCompareFallback(x, y);
}
}
catch (Exception) // 捕获 DllNotFound、EntryPointNotFoundException 等异常
{
// 异常时使用默认的字符串比较器
return string.Compare(x, y, StringComparison.Ordinal);
}
}
/// <summary>
/// C# 实现的自然排序回退方案(代码来自 AI,未测试!)
/// </summary>
private static int NaturalCompareFallback(string x, string y)
{
if (x == y) return 0;
int i = 0, j = 0;
while (i < x.Length && j < y.Length)
{
if (char.IsDigit(x[i]) && char.IsDigit(y[j]))
{
// 提取连续数字并进行数值比较
string num1 = ExtractNumber(x, ref i);
string num2 = ExtractNumber(y, ref j);
if (long.TryParse(num1, out long n1) && long.TryParse(num2, out long n2))
{
if (n1 != n2)
return n1.CompareTo(n2);
}
else
{
// 解析失败时按字符串比较
int strCompare = string.Compare(num1, num2, StringComparison.Ordinal);
if (strCompare != 0)
return strCompare;
}
}
else
{
// 非数字字符直接比较
if (x[i] != y[j])
return x[i].CompareTo(y[j]);
i++;
j++;
}
}
return x.Length.CompareTo(y.Length);
}
/// <summary>
/// 从字符串中提取连续的数字序列
/// </summary>
private static string ExtractNumber(string str, ref int index)
{
int start = index;
while (index < str.Length && char.IsDigit(str[index]))
{
index++;
}
return str.Substring(start, index - start);
}
}